Design Development
Design files:
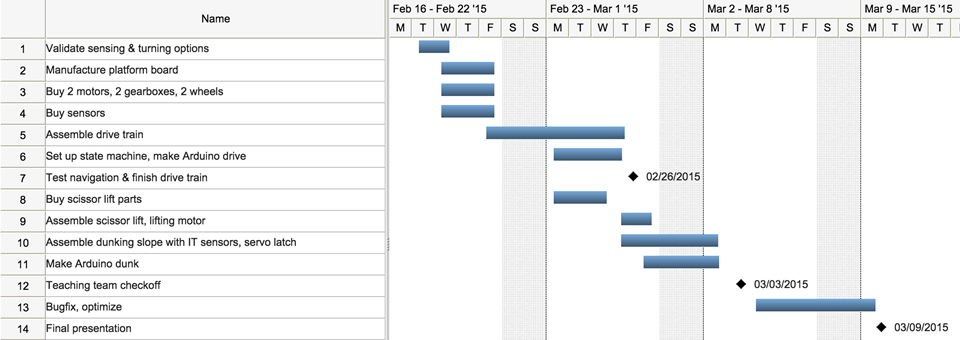
Early on in the design process we created a Gantt chart to coordinate our efforts through the few weeks we had to complete the project. The chart is displayed below. Overall, we found we were able to stick to the schedule, which greatly helped our efforts in completing the project.
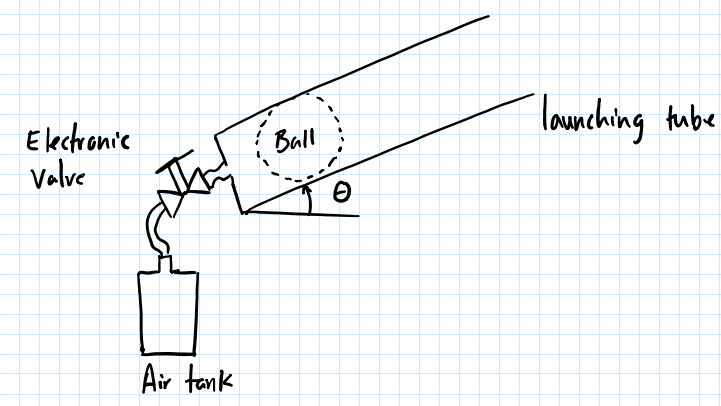
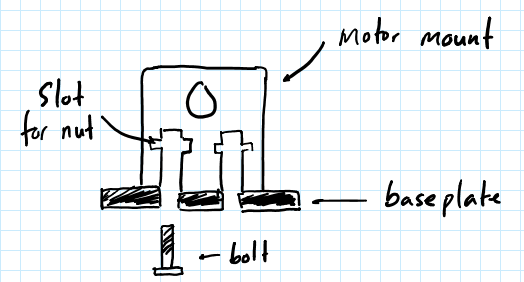
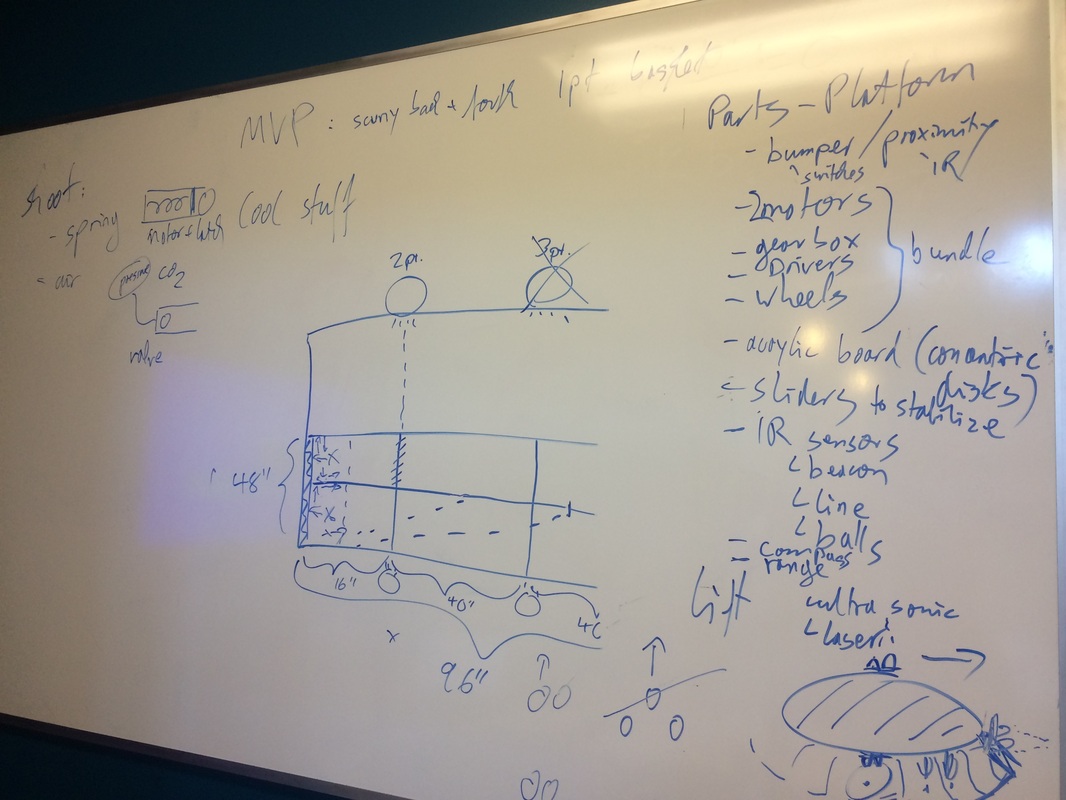
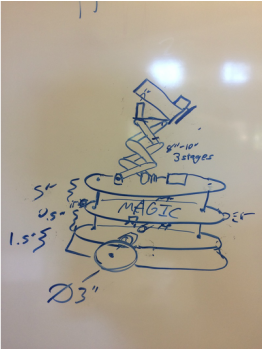
Displayed below are several initial sketches created to flesh out initial design ideas. Initially we discussed used a shooting-type mechanism, but ultimately decided against it as it may not be very consistent or even powerful enough to be reliable. Our first fully fleshed our design involved using a scissor lift to lift balls up to the dunking hoop in order to score. Our aim was to score as simply as possible to quickly checkoff.
|
|
|
|
|
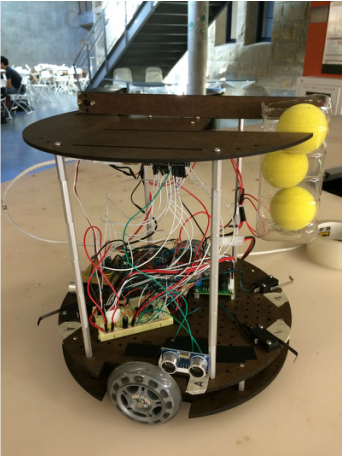
Finally, the final robot design that we used to checkoff and to present in the final competition is show below. After incorporating feedback, the scissor lift was changed to a rotating arm. In addition, a second sonar sensor was added to reposition the robot if it was no longer on the line after retrieving balls from the bumper.